Abstract
Magnetic tape guidance is a reliable method for industrial material flow, but traditional sensors provide only lateral position, leading to delayed responses to curvature and disturbances. The Naviq MTS160 sensor augments this with the tape's local heading angle. We incorporate this angle as a steering feedforward term in a differential-drive controller and evaluate it on a compact automated guided vehicle (AGV) testbed navigating an office track with merges, forks, and a charging spur. A minimal marker scheme—using left/right routing markers, a navicode coded marer to trigger slowdown and precise stopping, and a magnetic point marker for final docking—supports repeatable experiments and accurate charger alignment. Compared to a position-only baseline tuned for maximum stable gains, the position+angle controller achieves lower tracking error (mean absolute error reduced by 83%), requires smaller proportional gains, and shows reduced sensitivity to mechanical slack or compliance.

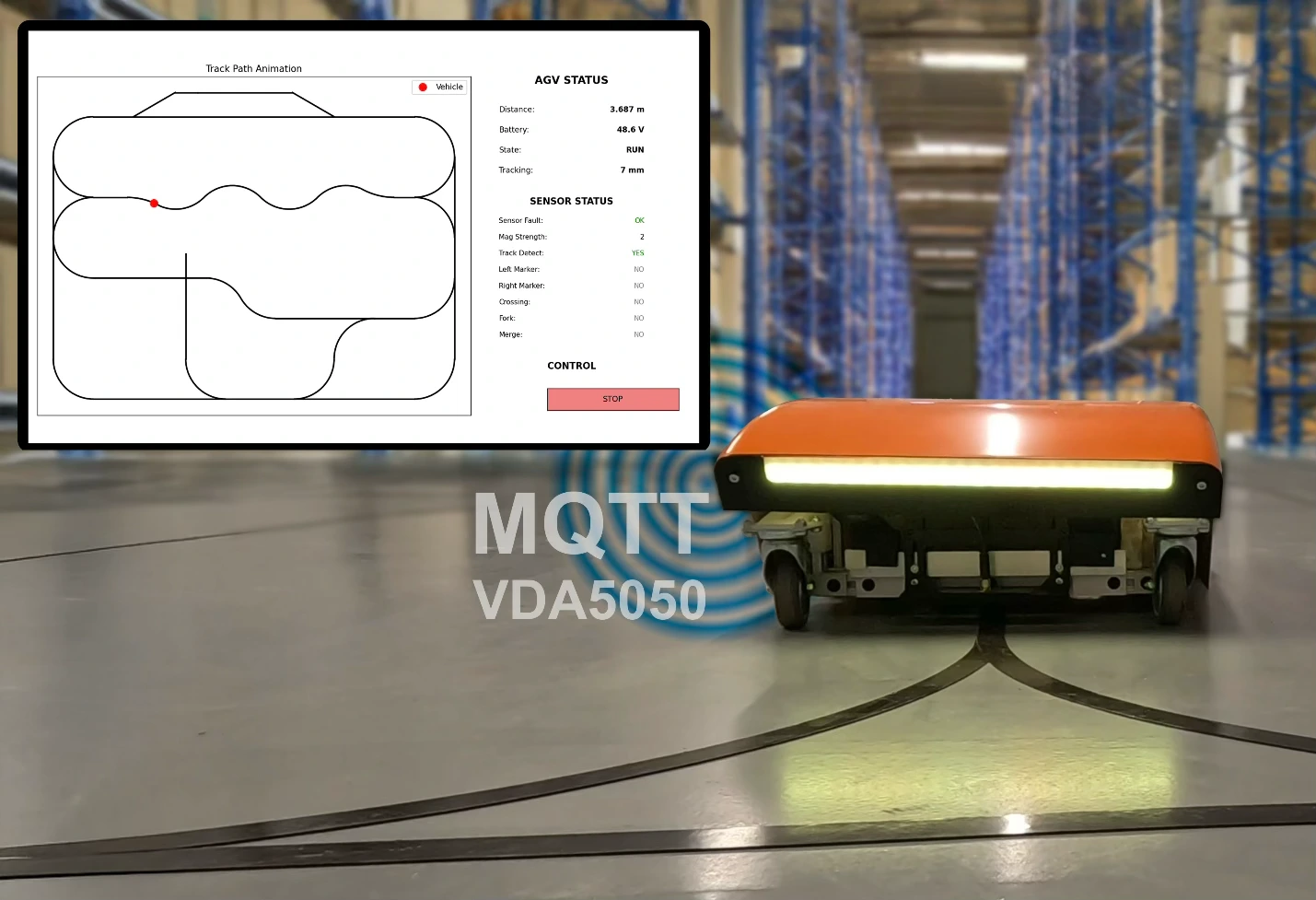
Figure 1: Compact differential-drive AGV used for experiments, equipped with the MTS160 magnetic guide sensor and controlled via a Raspberry Pi over CAN.
1. Introduction
Tape-guided AGVs are widely used in industrial material handling for their predictable paths, low infrastructure costs, and ease of reconfiguration. However, conventional sensors detect only lateral position, often requiring high feedback gains to manage curves and disturbances, which can lead to instability.
The NaviQ MTS160 addresses this by measuring both lateral offset and the tape's local heading angle. By using the angle as a feedforward steering term, the controller anticipates path changes, reducing reliance on feedback and enhancing stability.
This case study details our evaluation, including the AGV platform, track and marker design, sensing and control methods, and experimental results. We also discuss implications for commissioning, robustness, and docking precision.
2. System Overview
2.1 Hardware Platform
The testbed is a compact differential-drive AGV with two independently driven rear wheels and a front free caster. Each wheel operates under closed-loop speed control via its motor controller. A Raspberry Pi manages the system, interfacing with the MTS160 sensor and motor controllers over CAN. The control loop, written in Python, processes perception, navigation, and steering at 100 Hz.
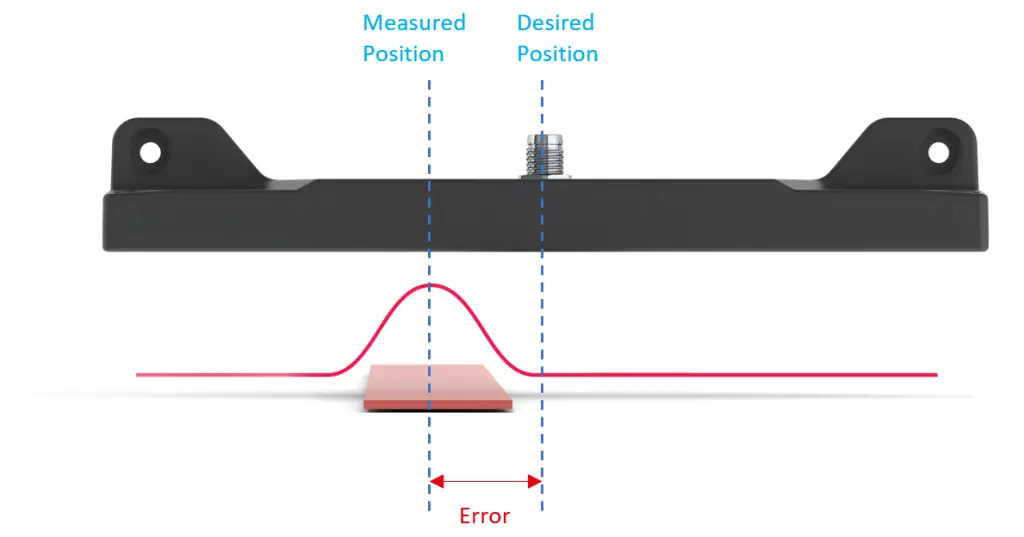
2.2 Sensor Capabilities
The MTS160 detects magnetic tape and reports two candidate lines (left and right), each with lateral offset and heading angle relative to the sensor frame. In straight sections, candidates align; at forks and merges, they diverge, allowing the controller to select based on markers (detailed in Section 3).
3. Track Layout and Marker-Based Navigation
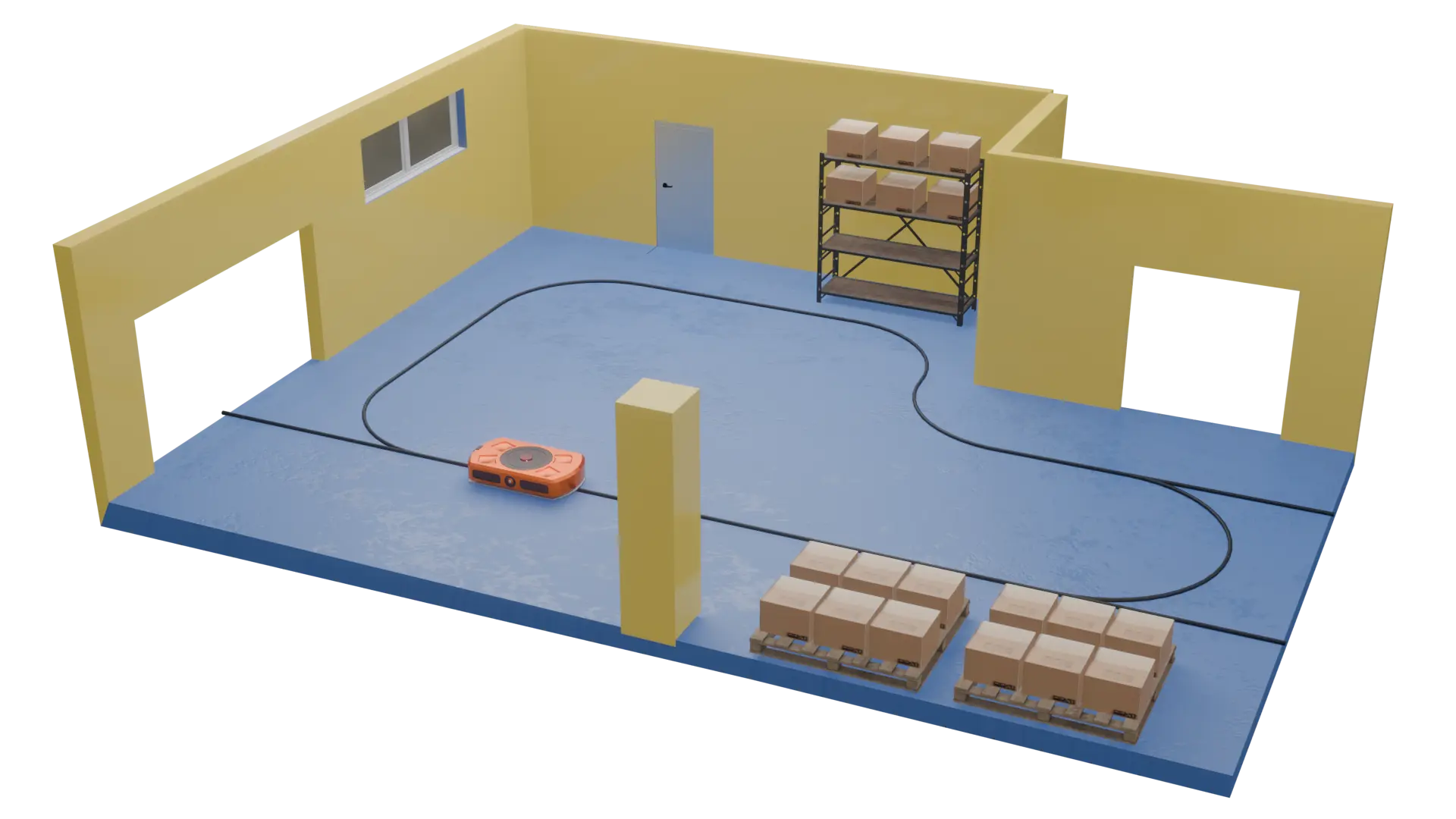
Experiments use a closed office track with merges, forks, crossings, and a charging dock to test the controller under varying curvatures and transitions.

Figure 3: Base track layout with direction markers, merges/forks, and charging spur.
Routing employs a simple, field-reconfigurable marker system:
- Routing Markers: Placed before forks, these indicate left or right path selection.
- Navicode: A short magnetic pattern before the docking segment, encoded using a sequence of left and right magnetic tape. The MTS160 decodes and reports it to the controller.
- Docking Trigger: A specific navicode value prompts speed reduction and arms point-marker detection.
- Point Marker: On the spur, this provides millimeter-level longitudinal positioning for precise stopping at the charger.
Figure 4 shows the AGV's trajectory along the track, as it follows the left/right path selection of markers. This system is easy to visualize and update in the field, and is extremely flexible.


Figure 4: AGV trajectory along the base track (split for clarity).
4. Sensing and Closed-Loop Control

Figure 5: Kinematic reference for the differential-drive AGV.
5. Experimental Setup
We compare two controllers at nominal speed V=0.5 m/s:
- Position-Only: Tuned with maximum stable Kp=10 (no oscillations).
- Position+Angle: Uses reduced Kp=1.5.
Multiple runs traverse the track once. Lateral error is logged at 100 Hz. We record the full trajectory of the AGV along the track, except for the final docking sequence.
6. Results and Discussion
Figure 6 compares lateral error time series over a curved segment. The position+angle controller shows smaller transients and tighter tracking, particularly at curvature entry.

Figure 6: Lateral error time series over a representative segment: position-only vs. position+angle.
Figure 7 quantifies absolute error near a marker: position+angle reduces mean absolute error from 15 mm to 9 mm (40% improvement) and halves the 95th percentile (from 30 mm to 15 mm), indicating fewer large deviations.

Figure 7: Absolute lateral error distribution in a representative region.
The angle feedforward shifts control from reactive to anticipatory, lowering feedback demands and tuning time. Lower gains reduce sensitivity to noise, backlash, and irregularities, improving stability at merges/forks.
For integrators, this enables faster commissioning and adaptability to payload/wear changes. Docking achieves <5 mm alignment in 95% of trials via point markers. Limitations include sensor reliance on clean tape (potential issues in dusty environments) and untested scaling to high-speed/large AGVs.
7. Conclusion
Integrating tape angle as steering feedforward enhances magnetic guidance simplicity and performance. On our testbed, the MTS160-based controller delivers tighter tracking, milder gains, and greater robustness. Paired with minimal markers and NaviCode logic, it provides a practical, maintainable solution for industrial AGV deployments.
References
[1] NaviQ MTS160 Product Page. Available: https://naviq.com/shop/mts160-magnetic-guide-sensor
[2] Controller Source Code and Derivations. Available: https://github.com/naviq-ch/naviqbot